Magnetorquing, otra imagen YACE
El Magnetorque en el AO-40 esta en progreso nuevamentehacia la actitud
ALON/ALAT 10/0.
La tabla siguiente de W4SM muestra la historia y planificacion para la
proximas orbitas.
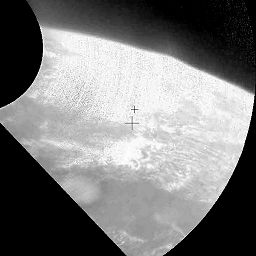
Durante la orbita 454 un nuevo juego de imagenes fueron sacadaspara determinar
exactamente la actitud del AO-40.
Ver una buena imagen abajo mostrando el oceano atlantico con la mitad
iluminado.
Pedimos disculpas por los inconvenientes con el servidor de amsat-dl.org
por varios dias Esperamos que no ocurra
nuevamente, si tienes inconvenientes esta la imagen del sitio en www.dj1km.de/amsat-dl
| OBSERVED | PREDICTED
ORBIT| RPM ALON ALAT SA# SA* | RPM ALON ALAT SA
-----+------+------+------+------+-----+------+------=+-------+----
454 | 5.78 | 353 | 2.1 | 255 | 2 |(camera) --- | ---- | --
455 | 5.75 | 351 | 2.1 | 253 | 1 | 5.72 | 352.5 | 2.7 | 2.4
456 | 5.47 | 351 | 2 | 253 | 1 | 5.69 | 352.8 | 2.7 | 2.0
457 | | | | | | 5.74 | 354.6 | 2.5 | 3.2
458 | | | | | | 5.77 | 357.0 | 2.0 | 5.0
459 | | | | | | 5.76 | 358.7 | 1.6 | 6.0
460 | | | | | | 5.68 | 359.2 | 1.5 | 6.0
461 | | | | | | 5.65 | 359.4 | 1.5 | 5.5
462 | | | | | | 5.63 | 1.1 | 1.5 | 6.4
463 | | | | | | 5.60 | 2.9 | 1.2 | 7.6
464 | | | | | | 5.55 | 3.2 | 0.8 | 7.4
AMSAT, 29.10.2001
Nueva version de P3T, Espesificaciones de TLM actualizada, imagen YACE
Stacey Mills, W4SM, publico la nueva version de su programa 1.6a de P3T,
para decodificar y mostra la telemetria del
AO-40. Puede ser bajado de www.cstone.net/~w4sm2/software2/P3t_AP.zip. El grupo de comando
saco un archivo
nuevo de especificaciones de telemetria del AO-40. Aparte de algunos cambios
cosmeticos las modificaciones de la informacion de los canales #100, #101,
#102, #11B, #11D, #13A, #13B, #195 and #1DD. Las mismas estan disponibles
en AO-40 IHU-1 TLM-Specs.
En orbita #445 tel grupo de comando tomo unas imagenes
YACE para determinar la actitud correcta de vuelo del AO-40.
Para tener una inpresion de como se ve la tierra en el apogeo ahora
mira la foto mas abajo. El set completo de fotos esta disponible en
el archivo de telemetria del AO-40
 .
.
DL6DBN, 26.10.2001
GPS test successful
ANS se complace en informar que que los experimentos de GPS en AO-40
han sido exitosos.
Este experimento patrocinado por NASA, es para determinar si es posible
conseguir los datos de posicion fuera del anillo de satelites GPS .
Hay dos receptores de GPS en AO-40, el receptor A, para las señales alrededor
del apogeo y el receptor de B para la recepción de señales alrededor del
perigeo.
Ambos receptores estan operacionales, y los datos de los receptores se
envian a traves de RUDAK al transmisor de la banda-S.
Jim White WD0E, ha sido el coordinador de AMSAT y jefe de operaciones
para esta actividad, informo que "nosotros recibimos señales en el receptor
del apogeo a aproximadamente 52 Mil Kilómetros, con buenos niveles de
señales, estos datos se están recogiéndo, aquéllos transmitidos hasta
ahora, se están analizándo.
Bauer KA3HDO Franco, AMSAT-VP Human Spaceflight Programs, dijo "Si este
experimento va de la manera yo espero, revolucionará la manera en que
nosotros usamos GPS en el Espacio.
Muchos satelites HEO del futuro podrán aprovecharse de GPS para la navegación
autónoma y mantenimiento de estacion (stationkeeping)."
AMSAT Presidente, Robin Haighton, VE3FRH, estaba encantado con las noticias
del el éxito del GPS, y comentó que "Es lindo poder ayudar a nuestros
amigos de la NASA. probando este experimento, por mucho tiempo esperado,
y nosotros estabamos preocupados que la radiación pudiera haber dañado
a los receptores de GPS.
Ahora por fin nosotros tenemos un resultado muy positivo de este inportante
experimento."
Mantenga la sintonia de ANS para detalles extensos, cuando estos esten
disponibles. ANS Editor Dan James (N0DJ@amsat.org)
RUDAK Prendido nuevamente.
RUDAK esta de vuelta en linea desde la Orbita Orbit 399, con el GPS prendido
GPS. NASA ha estado muy ávida por los datos del sistema. El balance de
potencia esta equilibrado y se ve bien, después de desactivar por primera
vez el K-Tx, regresara a un programa fijo. Así que nosotros tenemos K-Tx
en de MA=118 a 138.
Por favor tomar nota que no tenemos el MB Baliza central entre MA=70
a 86.
AMSAT, 13.09.2001
AO-40, K-TX Prueba exitosa !
En Órbita 396, de MA=118 a 138, el transmisor de la K-banda (24.048 GHz)
se activo y conectó a las mismas entradas como el transmisor de S2.
El passband y baliza fue descubierta primero por Petra G4KGC (el op de
la radio) y Charlie Suckling G3WDG (el op del plato) a 1930 utc, MA=122.
Brevemente después de esto la baliza y los passband también eran descubiertos
por Michael Fletcher, OH2AUE.
Los Suckling's ha usado que un plato de 22 ctms de diametro informó los
señales 6 dB sobre el suelo del ruido.
Michael usó un plato de 60 ctms y informó que la baliza era 7 db sobre
el suelo del ruido, bajo condiciones no ideales con los cielos nublados
y lluvia ocasional.
Los dos usaron los alimentadores lineales y las señales heran buenas y
estables, salvo de un cíclico profundo de fading debido a la alimentacion
lineal de la K-Tx antena, y la rotación del AO-40. Un alimentador de polarizacion
circular debe eliminar éstas variaciones por giro.
El equipo de Commando esta encantado de informar de este transmisor funcionando
en el AO-40!
W4SM for the command team
Por mas detalles, graficos y grabaciones ir a : www.oh2aue.pp.fi/24048.htm
AMSAT, 11.09.2001
AO-40 Logger de actividad
Alex Artieda, HB9DRI, instalo un ASP-logger en internet para cualquier
actividad del AO-40. En www.artieda.net/hb9dri/ao40logger
Tu puedes entrar tu reporte, actividad u observacion o leer los ultimos
100 reportes ingresados a la lista. El sistema es similar al DX-cluster
pero relacionado a internet y el AO-40.
DL6DBN, 09.09.2001
Interrupcion no esperada de S2
El martes 28 de agosto, el S2-TX no regresó con MB y passband del transponder
después de RUDAK a MA 44.
Con la ayuda de DF4PV y su disco de 6mts se descubrieron señales débiles
del MB con sonido normal pero muy debil para descifrar la telemetria.
El transmisor mismo no se cambia de forma alguna al cambiar de RUDAK,
al MB y transponder, parece que la IF-matriz no recibió la orden para
cambiar correctamente.
Desgraciadamente AO-40 estaba fuera de vista de una estación de control
cuando el problema ocurrio.
Después, en la misma órbita ellos recompucieron la orden y retorno la
señal con toda la potencia. ¡Bien hecho!
Para investigar el evento RUDAK y otros experimentos se han apagado precaucion.
Así que espere la modificacion de horario.
DL6DBN, 29.08.2001
AO-40 Update, Orbit 374
MB OFF FROM MA 220 to 250
AO-40 está a punto de entrar en un periodo largo durante el cual la tierra
eclipsa el sol cerca del perigeo.
Éstos realmente no empezarán hasta unos dias más (El 28 de agosto), pero
una vez ellos empiezen, los mismos aumentarán rápidamente en longitud
y continúaran hasta junio del próximo año.
Durante septiembre, el pico de los eclipses alcanzaran un máximo a 85
minutos en duración.
Para conservar las baterías, y desde que el squint es bastante malo durante
este tiempo, el S2 Tx, incluso la Baliza central MB estará apagada de
MA 220 a 250, con efecto inmediato.
Por consiguiente, no desesperar si el MB no se encuentra durante estos
periodos.
Los tiempos del prendido/apagado (on/off) se ajustarán ligeramente en
un par de meses, con el movimiento de los tiempos de eclipse (Ver horario
al comienzo)
ALON/ALAT
ALON/ALAT simplemente se ha ajustado y es aprox. ALON/ALAT = 350/2. ALON
disminuira aproximadamente 1.5 degrees/perigee debido al "Misterioso efecto".
Se ajustará de nuevo en varios días para quedarse en el rango de 340/350
los grados.
AMSAT, 23.08.2001
Nuevas pruebas con las ruedas !!!
Estimados Todos,
Stacey Mills W4SM y James Miller G3RUH dirigió otra sesión de la rueda
anoche en Órbita #365 y los cálculos
resultantes mas abajo proporcionados por Karl Meinzer DJ4ZC.
Las ruedas se hicieron girar a mas de +100 RPM. Esto fue rápidamente
cumplimentado con sincronismo (lock) en
las tres ruedas. Se mantubieron a esta velocidad durante ~30 minutos.
La Telemetria antes y después del girar de las ruedas, una vez los sensores
solares se re-sincronizaron mostraron:
02.65222 + / - 0.00002 RPM línea de fondo
02.61468 + / - 0.00004 RPM después del giro a +100 RPM
----------
-0.0375 RPM (para +100 RPM en las ruedas)
Si todo fue hecho correctamente en el satelite - y los datos anteriores
confirman esto - el giro positivo está en la
misma dirección como el z-eje.
Así girando las ruedas positivamente, la velocidad adquirida (momentum)
está en la misma dirección como el giro del satelite. Desde que la velocidad
adquirida angular total se conserva, el satelite el giro debe disminuir,
qué lo hizo. ¡Bueno!
Ahora algunos datos de las ruedas:
Izz = 54.6*10^-3 kgm^2
Tmotor = 29.0*10^-3 Nm a 25 rad/s
Las 3 ruedas como consecuencia del producto de geometría de montura un
eficaz Iz como visto por el satelite (si operada con rpm iguales):
Iz(3wheels) = Izz * SQR(3) = 94.57*10^-3 kgm^2
Así que la prueba con 100 rpm o 10.472 rad/s puso una velocidad adquirida
de 0.9903 Nm en el eje paralelo al z-eje del satelite, los otros componentes
se cancelan.
Con el delta anterior de -0.0375 rpm o -3.927*10^-3 rad/s
esto resulta en el satelite Izz de 252.19 kgm^2
Con la figura muy exacta del satelite Izz, nosotros esperamos tener suficiente
los datos para deducir de esta figura el estado de nuestros tanques de
combustible.
¡Nosotros podemos decir con algún cuatela que tenemos un sistema de mando
de 3-eje activo!!!
Más pruebas se harán durante las próximas semanas, antes nosotros transfiriremos
la estabilizacion del satelite de giro a 3 ejes.
73s Peter DB2OS por el Equipo de AO-40
AMSAT, 17.08.2001
¡AO-40: Las ruedas giroscopicas Probadas !!!
Estimados todos,
En Órbita #364 las ruedas se impulsaron y sincronizadas (synched) a 0
RPM inmediatamente!!
El consumo de potencia no era perceptible. Ningún esfuerzo fue hecho en
esta prueba para llevar a las ruedas a 100 RPM.
Esto se realizara en las proximas orbitas. De hecho, ejecutando la prueba
a 0 RPM ya era la prueba más crítica.
Si las ruedas no pudieron "volar" y moverse libremente, nunca ubieramos
detectado "sincronización" en la telemetria.. Como un próximo paso, las
ruedas se programarían para 100 rpm rotación (todas en la misma dirección
y al mismo tiempo) y de nuevo nosotros esperaremos sincronismo (synch)
que debe ser obtenido al minuto.
Si todo va bien, entonces nosotros les permitiremos correr para realizar
las mediciones del giro durante algún tiempo de el satelite y observando
el consumo de potencia.
Esta prueba nos daría la calibración de la constante más importante de
el sistema de las ruedas, a saber la proporción del satelite MOI y al
MOI de las ruedas. En la proactica, desde que la MOIs de las ruedas son
precisamente conocidos, esto significa que nosotros seríamos capaz para
determinar el MOI del satelite a aproximadamente 5% - de esto nosotros
podríamos inferir posiblemente cuánto combustible se sale en los tanques
de N2O4/MMH.
También esta figura se necesita para el software de 3-ejes y por planear
la transición del spin/3-eje.
¡Las felicitaciones a Karl, Stacey, James y todos los involucrados!
Aquí información más general:
Momentum
Wheel with Magnetic Bearing
73s Peter DB2OS
http://www.amsat.org/amsat-dl/adl-engl.html
AMSAT, 15.08.2001
Noticias AO-40, S1 Tx dejo de funcionar.
En la órbita 362 en MA 57 (2001-08-13, 12:57:53 UTC), mientras el AO-40
estaba a la vista de la mayoría del hemisferio oriental, el transmisor
de S1 dejó de transmitir abruptamente en medio de un bloque A-blk. Las
lecturas de Telemetria hasta el momento de la cesación (los voltajes,
corrientes, las temperaturas, etc.) eran completamente normal. Ningún
comando o experimentación estaba haciéndose en ese momento.
El controlador de tareas (scheduler) conectaron el S2 como estaba programado
en MA=100. La telemetria después de MA=100, no motro ninguna anormalidad
y tampoco los eventos registrados para analizar esta falla.
Un esfuerzo inicial para encender a mano el S1 Tx no parecío exitoso.
Mientras nosotros estudiamos esta situación, el S1 Tx se ha sacado de
la programacion. Así que los pasabandas de U/L1 -> S2 estaran activos
de MA 10-30 y MA 44-100. Como antes, RUDAK se conecta al S2 Tx (la baliza
apagada) de MA=30-44.
Los mensajes en los bloques no se han puesto al día todavía. Esto se
hará dentro de las próximas órbitas. El horario también puede modificarse
por periodos de banda pasante (passband) más largos, dado que la antena
helicoidal de S2 tiene una cobertura mas ancha.
Cuando la información este disponible, nosotros lo anunciaremos aquí.
W4SM para el AO-40 Equipo de Comando
DB2OS reporta: El giro a sido reducido y se planea realizar
magnetorques durante 6 perigeos de 261º/-3º a 290º/-2
a 3.2 RPM y seguir a Alon/Alat 0º/0º. Ninguna otra noticia.... Solamente
que habra muchas cosas relacionadas con
el AO-40 en el Amsat-UK
Colloquium de este año, concurran y compren un pin de AMSAT-DL.
NORAD encontro al AO 40 nuevamente, keplers arriba. ALAT -2,
ALON 262
Informado por DB2OS: El soplado de gas a través del Arcjet
esta terminado. Aquí esta un juego de elementos kelperianos generados de
ranging data?. Más se hará en los próximos días.
El S2 TX está apagado de MA 100-180 para ahorrar potencia
para el ATOS.
El generador de gas de amoníaco consume aproximadamente
120 - 130 W de potencia cuando se prende el termostato.
El IHU-2 está corriendo y está registrando la telemetría
en un buffer tipo FIFO con dos días y medio de capacidad de datos. La
telemetría transmitidos de esta hora de encendido indicaron que el presupuesto
de potencia fue positivo y todo parece normal.
El empuje de la órbita 296 empezó en MA 121.4 y duró por
3618s. La aceleración estimada puede estar en el orden de 54E-6 m/s^2,
y la dirección de aceleración es hacia alon 274, alat -2 (la actitud actual).
Dado o tomando lo desconocido, el resultado esperado de
esto es:
|
Before |
After |
| Epoch time |
173.12145 |
173.16312 |
| Inclination |
5.2833 |
5.2833592 |
| R.A.A.N |
180.71591 |
180.70361 |
| Eccentricity |
0.815077 |
0.8150139 |
| Arg perigee |
288.69088 |
288.71333 |
| Mean Anomaly |
121.4 |
140.46836 |
| Mean motion |
1.2711484 |
1.2710861 |
| Revolution |
296 |
296 |
| SMA |
36003.6 |
36004.773 |
| Perigee height |
279.754 |
282.2427 +2.5
km |
| Apogee height |
58971.166 |
58971.024 |
Así que el perigeo se levantó por esta hora de soplado en aproximadamente
+2.5 km., pero sólo se uso una porcentaje de empuje de 50%.
Desde que todo fue tan bien, a la computadora de abordo
del AO-40 le fue ordenado para comenzar con periodos de 2horas "soplado"
que empiezan alrededor del apogeo desde la órbita 297 durante las próximas
tres órbitas.
El primer soplado de 2-horas se detuvo en la Órbita 297
MA 142 que fue 2001 Jun 23 0154 utc.
De nuevo, toda la telemetría está pareciendo bien y nosotros
podemos extender pronto a 4horas "soplado" y posiblemente podemos aumentar
el nivel del empuje también.
Mientras que nosotros no hemos visto los últimos datos de
NORAD todavía, (OIG parecen detener durante el fin de semana), algunos
efectos en los cambios de órbita deben ser notables pronto.
De hecho, todos nosotros estamos muy contentos con los resultados
exitosos del ATOS (Arcjet Thruster en el OSCAR Satellite) hasta ahora.
Un poco más información sobre ATOS está disponible en: http://www.irs.uni-stuttgart.de/RESEARCH/EL_PROP/PROJ/e_atos.html
Baliza del AO-40 Apagada entre MA 100-180
La Baliza del medio en S2 o sea en 2,4001.323 Mhz, estara
apagada entre MA 100 y MA 180 para tener mas energia
disponible para el generador de Gas para el ARCJET, recordemos que es
necesario calentarlo para que se gasifique
y consume entre 125 y 130 W
¡Primera prueba del Arcjet parece tener éxito!
Estimados,
La primera activación de el sistema del alimentacion del propulsor ATOS
se realizó con éxito en la órbita #295.
La telemetria confirmó que el calentador para el amoníaco,
el controlador de proporción de flujo, válvulas e indicadores de presión
parecen trabajar correctamente.
La duración del soplado del gas fue de aproximadamente 22
minutos y se aumentará ahora durante las pruebas futuras. ¡Las felicitaciones
al equipo de Comando por otro trabajo extraordinario!
73s Peter DB2OS
para el equipo de AO-40

Mas YACE-imagenes e informacion relacionada
esta disponible en AO-40
telemetry-archive
A HI, THIS IS AMSAT OSCAR-40 2001-06-21 02:17:34 #01ED
+--------------------------------------------------------------+
| ALON/ALAT=275/-2, Beginning ArcJet Tests, TRANSPONDERS OFF |
+--------------------------------------------------------------+
M QST AMSAT OSCAR-40 ***UPDATE*** 2001-06-21
ALON/ALAT = 275/-2. Middle beacon on continuously
Transponders off.
Arcjet Testing beginning for raising perigee.
The AO-40 team would like your telemetry files!
Please "zip" compress your daily telemetry files and e-mail to:
ao40-archive@amsat.org
Levantando el Perigeo al probar el Arcjet.
Nosotros estamos acercándonos a la poscicion 270/0 y se planea probar
el ARCJET pronto.
La primera prueba se hará sin encendido eléctrico soplando sólo gas,
se probaran todos los sistemas y se levantará el perigeo en unos cientos
de kilómetros.
Acerca de la performance del arcjet, nosotros tenemos varias incertidumbres.
La más importante es la masa real del AO-40. Si nosotros solo soplamos
el gas, nosotros podemos esperar un Isp en el orden de 1000 m/s.
Con el arco quemando, será por lo menos 4000 m/s, probablemente alrededor
de 4500 m/s.
Con 500 kg s/c de masa (peso) nosotros podríamos lograr del arcjet un
total delta-v de 500 m/s. por otro lado si el arco no trabaja, nosotros
sólo entraríamos el orden de 100 m/s.
Por cada 100 km que nosotros queremos levantar el perigeo, necesitamos
un delta-v de aproximadamente 7.25 m/s al apogeo. Si nosotros asumimos
una masa del satelite de alrededor de 500 kg, soplando el gas simplemente
exigirían un gasto de masa de 3.6 kg levantar el apogeo por 100 km (fuera
de 50 kg +).
Por otro lado, con el motor quemando, nosotros necesitaríamos sólo alrededor
de 0.8 kg; unas 10horas de tiempo prendido con 1000 W de consumo.
Asumiendo que sin el arco el regulador de flujo de masa (MFC) todavía
produciría un flujo de masa de 20 - 30 mg/s, entonces nosotros estamos
hablando aproximadamente un tiempo soplando total de 30 a 40 h.
Debido a la masa del satelite (asumiéndolo todavía es 500 kg), nosotros
no podemos hacer un cambio grande en la inclinación, pero todavía podemos
lograr una orbita de 16 horas.
Esto seria mucho mejor que las condiciones de visibilidad actuales.
Los requerimos delta-v por lograr una órbita de 16 horas con las alturas
diferentes de perigeo (sin cambio de inclinación) es:
500 km 77 m/s
1000 km 120 m/s
2000 km 200 m/s
4000 km 350 m/s
En caso de que el arco no trabaje y nosotros quisieramos un periodo orbital
de 16 horas , la altura de perigeo no debe aumentarse más allá de 750
km.
Resumen:
1) Para la primera prueba nosotros no necesitamos preocuparnos por la
electrónica de alto poder del ArcJet.
2) Nosotros podemos soplar el gas por varias horas alrededor de apogeo
cosa que nunca se podria hacer si estubiera prendida la electronica del
Arcjet sin tener los paneles solares completamente desplegados.
3) El empujón será mucho menor como que con el ArcJet quemando, pero
dado que nosotros podemos soplar el gas por un periodo del más tiempo
de tiempo en cada órbita sin preocuparse por las baterías, nosotros podemos
levantar el perigeo realmente más rápido de esta manera.
4) Nosotros necesitamos empujar (sólo gas) a 0.1 kg/hour durante 40 horas
(4 kg NH3) para levantar el perigeo en 100 km.
5) Este nivel de empuje es 60% del TMFC (regulador de flujo de masa)
o 27 mg/s.
6) Si nosotros queremos levantar el perigeo por 200 km, nosotros podríamos
empujar durante 4 horas alrededor del apogeo por 20 órbitas y podríamos
llegar allí.
7) Nosotros consumiríamos 8 kg de nuestro 53 kg NH3 en el proceso.
8) Nosotros podriamos teoricamente dejar salir gas (outgas) durante 8
horas alrededor del apogeo con el regulador de flujo puesto al 95% y el
aumento del perigeo sera aproximadamente 200 km en 10 órbitas.
9) Nosotros todavía podemos lograr un periodo orbital de 16 horas (sin
cualquier cambio de inclinación).
73s Peter DB2OS
Por el equipo de AO-40
Requerimiento de Telemetria Muy pronto el equipo de Comando estará sacando
algunas fotos con la cámara de YACE. Ésto es para ayudar en la determinación
de la actitud del satelite antes de la prueba la quemadura fría del motor
del arcjet.
¡Se pide su ayuda con la captura detelemetria , particularmente los bloques
D!
Por favor capture todo lo que usted pueda, Zipearlo y envíar su telemetry
a ao40-archive@amsat.org
¡CADA BLOQUE CUENTA - CRCC BUENO O MALO!
73, Paul, VP9MU, el AO-40 Telemetry Archivo.
AMSAT-DL, 18.06.2001
YACE-Bilder - K-Band-Test - ALON/ALAT 4/1 (May 17th)
En Órbita 251 algunas imágenes de la Tierra fueron tomadas para la determinación
de actitud.
YACE e IHU-2 tomaron estas y encontró que esta trabajando bien, con algunas
gotas en la vista, que nosotros ya podíamos ver en imágenes parecidas
luego del incidente de Diciembre.
Las imágenes estan distorcionadas por el giro de AO-40 de 50° (7 rpm)
durante la exposición.
El juego entero de cuadros tomado puede encontrarse en el archivo
de telemetria de la órbita 251 el 17 de mayo de 2001.
La actitud era determinada como ALON/ALAT 4/1 el 17 de mayo.
Durante la mañana del 20 de mayo algunas pruebas de la K-Banda-TX (24
GHz) y de nuevo el X-Banda (10 GHz) se anunció. Los informes no han entrado
todavía.
DL6DBN, 20.05.2001,

Nuevo programa
La baliza S2 MB esta nuevamente prendida durante toda la orbita. Experimentos
con la operacion de transponder modo
UL1/S2 es posible de MA 70 a 210 con angulos por debajo de 20 degrees.
DL6DBN, 16.05.2001
AO-40: El informe de la X-Banda
Stacey W4SM y Michael OH2AUE probaron los transmisores de la X-Banda
(de estado sólido y TWT) ayer (2001-05-13) entre las 04:11 UTC y 06:00
UTC.
Desgraciadamente la prueba no tuvo el éxito.
La telemetry de IHU-1 indica que las órdenes heran correctas, pero las
indicaciones son que ningúna potencia está llegando a cualquiera de los
módulos del X-Banda.
Nada pasó... de hecho, incluso los estados de los sensores de temperatura
en los módulos del X-Banda no cambiaron.
Estos sensores no son los thermistors como el resto y necesitan suministro
de alimentacion para dar lecturas válidas.
Los valores no cambiaron cuando se comando el encendido del módulo, por
ello no hay poder eléctrico dentro del módulo.
El problema debe estar en la alimentacion de 28V-S o en la módulo poder
en su línea de comando del IHU.
Semejante problema nunca se observó durante toda la comprobación en Orlando
y Kourou.
Un problema del software es muy improbable.
Sin embargo, se planea investigar este extenso en los próximos días y
otro esfuerzo se hará pronto.
73s Peter DB2OS
for the whole AO-40 team
AMSAT-DL, 14.05.2001
El C-RX fue teporariamente conectado a S1-TX (transpondertest).
Lamentablemente no han llegado reportes positivos todavia. C-RX AGC telemetry
mostro los esperados 20 dB. Futuros ensayos serian necesarios.
DL6DBN, 13.05.2001
LEILA, RUDAK, X, C y más...
¡La historia era hecho el sábado (el 12 de mayo) cuando
el sistema de LEILA en AO-40 se prendio por primera vez!
Esta mañana un par de *Muy * fuertes señales aparecían en el bandapasante
(passband), varios dB más ruidoso que el MB!!! Varias personas intentaron
conseguir que ellos redujeran la potencia, pero ellos no estaban escuchando
al parecer.
El AGC en la U-banda Rx estaba suprimiendo unos 16db, claramente en sincronización
con sus transmisiones y había ruido mezcalado en el passband....
Recuerde que el MB tiene 8dB más de señal que los GB y los usuarios no
deben tener mas intensidad de señal que el GB. Así que fue decidido que
ésta podría ser una oportunidad buena para probar LEILA. LEILA se cambió
en el passband de U-banda que puede verse por la configuración de la MATRIZ.
¡LEILA se configuró para el modo de SCAN/JAM/NOTCH y funcionó como un
encanto!! ¡El umbral se puso a un nivel que era aproximadamente igual
a la señal de GB que significa que cualquier señal más fuerte que descubra
por LEILA.. una "sirena policíaca" se oirá para dar una oportunidad para
reducir la potencia, de otra forma se activara la muesca (notch) hará
su trabajo...:)
Las personas en el passband lo amaran!
Ésto es de hecho, otro éxito mayor dentro de unas semanas para el AO-40
y en particular para el concepto de LEILA (el Límite de LEIstungs Anzeige)
que se diseñó por AMSAT-DL (Dr. Karl Meinzer DJ4ZC y Matjaz Vidmar S53MV)
y también apoyado por el ministerio alemán de ciencia y tecnología.
De hecho, es la primera vez que semejante sistema se usa en el espacio
para un transponder con el acceso múltiple no cordinado. Si todo va bien,
nosotros probablemente dejaremos continuamente LEILA activado..
Entretanto el equipo de RUDAK también hizo buen progreso y ambos CPU's
están corriendo ahora por más de 10 días.
En un esfuerzo de 6 horas en la mañana del viernes Jim White WD0E terminó
la carga los programas para el GPS en RUDAK-A y cargado del soft de CEDEX.
Ambas tareas están corriendo, pero no se enviaron órdenes para empezar
su funciones todavía. Esto se planea para sabado o el domingo, cuando
registren los datos de CEDEX y posiblemente una GPS lock se comenzará.
Jim también informó que RUDAK-A TLM continúa pareciendo normal y también
los SmartNode temperatura sensores en el bús de CAN parecen trabajar bien.
Ambos 153.6 KBPs highspeed también se verificaron los downlinks de PSK
y ellos se escucharon como lo esperado y se apagó de nuevo.
Mientras con cero Doppler las frecuencias del downlink de los 9k6 modulador-demoduladores
del hardware a través de S1 están:
RUD A MOD 0 = 2400.791
RUD A MOD 1 = 2400.765
RUD B MOD 0 = 2400.910
RUD B MOD 1 = 2400.891
(medido con una exactitud de +-5 KHz)
¡Y finalmente... la X-banda y posiblemente la comprobación de la C-banda
esta mañana!!!
73s Peter DB2OS
for the whole AO-40 team
AMSAT-DL, 13.05.200
Las pruebas de X-Banda y C-Banda por venir
| X-Downlink: |
10451.025 - 10451.275 MHz |
MB: 10451.125 MHz |
| C-Uplink: |
5668.800 - 5668.550 MHz |
keep MB clear |
Después de una semana muy exitosa de funcionamiento del
transponder de S-banda, nosotros estamos planeando incluso ir más allá
para probar los 10 GHz X-banda downlink este fin de semana.
Michael Fletcher OH2AUE ayudará al grupo de Comando, cuando el transmisor
de la X-banda de estado sólido y amplificador de TWT sea prendido por
primera vez estando en órbita.
El domingo, alrededor de 05:00 UTC, 2001-05-13, MA 165, el amplificador
de estado sólido de la X-banda se encenderá y ajustará.
Si todo va bien, el lineal de 60W TWT también se encenderá.
Se usarán las balizas y probablemente el L1-uplink.
El mejor consejo es mirar la matriz de conexiones durante este tiempo.
Ellos contarán la historia completamente. Nosotros también planeamos conectar
al receptor de C-banda al downlink del X-banda: -)
Al final, nosotros apagaremos la X-banda, pero se puede dejar Rx al C-banda
y puede conectarse al S2 Tx.
De hecho, el funcionamiento del transponder de S-banda en S2 (con RUDAK
en S2) continuará.
Siempre es posible que el funcionamiento del tansponder se interrumpa
durante algunas otras pruebas.
Por favor recuerde no transmitir en la subida de la Baliza del Medio (MB)
y su propia señal debe ser aproximadamente 10dB por debajo de la Baliza
del Medio.
El MB es aproximadamente 8dB más fuerte que la Baliza General (GB), pero
no hay ningún GB en S2.
También verifique http://www.amsat-dl.org/journal/adlj-p3d.htm
para las últimas noticias en alemán e inglés.
Buena Suerte,
73s Peter DB2OS
AMSAT-DL, 10.05.2001
Que bello dia! Fue el dia de Europa.
Lo mejor desde AO-40 : Reportes de recepcion informan que
con discos de 35 centimetros de diámetro o una antena de 16 vueltas de
giro.
Potencia de subida (Uplinkpower) debajo de 25 Weirp el U-banda y 100 Weirp
el L-banda y que con la desensibilizacion alrededor de RX 12-18 dB AGC
(el promedio 6-10 dB).
Qué esperaremos nosotros con el S1-Sender y LEILA encendido?
Por favor tome nota: QSO-signalstrength debe ser 10 dB debajo de la intensidad
de la Baliza del Medio (MB) , cuando MB es +10 dB a GB que da QSO-strenght
máximo.
Más mediciones de la banda pasante dio los resultados de la mesa (sin
Doppler!)
| S2-Downlink: |
2401.210 - 2401.495 MHz |
MB: 2401.323 MHz |
| L1-Uplink: |
1269.496 - 1269.211 MHz |
so keep clear: 1269.400 -1269.360 MHz |
| U-Uplink: |
435.780 - 435.495 MHz |
so keep clear: 435.685 - 435.645 MHz |
U-Uplink = 2836.990 - S2-Downlink (MHz)
L1-Uplink = 3670.706 - S2-Downlink (MHz)
DL6DBN, 06.05.2001,
Reporte Primera Operacion de Transponder
 U
y L1-RX se conectaron al S2-TX como esperado.
U
y L1-RX se conectaron al S2-TX como esperado.
Inmediatamente las primeras señales aparecían en el passband, pero desgraciadamente
por 10 a 15 db demasiadas fuertes degradando la sensibilidad del U-RX
demasiado (vea el U-RX AGC diagrama).
LEILA no estaba prendido.
QSOs con el Uplinkbudget predicho y esperado de 100 - 200 Weirpc no ocurrio
debido a los "caimanes" (la boca grande, las orejas pequeñas).
Sin LEILA, nosotros tenemos los problemas bien conocidos de nuevo. Después
S1-TX se encendió y temporalmente moduló con GB, MB o RUDAK.
Hasta LOS sólo un lobulo lateral podía oírse en Europa. Durante el funcionamiento
las temperaturas se mantuvieron normales y el balance de energia (powerbudget)
era positivo con un sunangle de aproximadamente 4 deg.
El 6 de mayo nosotros podemos esperar un tiempo más largo de funcionamiento
Europa con angulo debajo de 10 deg les mejoran S1-receiption experimental.
DL6DBN, 05.05.2001
Transponder On from May 5th!
Queridos Todos,
El funcionamiento del transponder experimental empezará
el sábado por la mañana el 5 de mayo a aproximadamente 08:00 utc cuando
se conectarán el U-banda y uplinks del L1-banda al S2 transmisor pasabanda
en la Matriz.
Si no hay ningún problema, los transponder serán utilizables hasta MA
240. Se encenderá de nuevo en la misma configuración alrededor de MA 135.
Se anunciarán los cambios del horario en la baliza de telemetria. Por
favor note que éste es el funcionamiento del transponder experimental:
Transponders puede cerrarse sin aviso, el horario puede cambiar sin aviso,
etc....
También recuerde que + / - 5 kHz alrededor de la Baliza del medio (MB)
debe evitarse. Si la baliza no puede copiarse debido a la interferencia
con los usuarios en el passband, los passband pueden ser desconectados
y el funcionamiento del transponder apagado.
Nosotros esperamos muy buenas condiciones el sábado por la mañana encima
del EE.UU., América del Sur, Africa y Europa. La ventana para el funcionamiento
del transponder es aproximadamente 10 días, antes de que nosotros intentemos
levantar perigeo que usando el Arcjet.
También se planea probar el U-banda y transmisores del V-banda de nuevo
cuando la posicion y visibilidad sean buenas. Nosotros pondremos el anuncio
por adelantado, para que las "armas grandes" puedan escuchar para las
señales débiles.
Es innecesario decir, que todos nosotros estamos muy entusiasmados..
73s Peter DB2OS
for the AO-40 Command Team
AMSAT-DL, 04.05.2001
Carga del Software al RUDAX
WD0E a cargado con exito los programas primarios de quehaceres
primarios en RUDAK-A que ahora está enviando la telemetria y a través
de el downlink de IHU. El software de RUDAK-B no ha sido cargado todavía.
Los valores de Telemetia parecen normales a la primer mirada. G3RUH informa
buena copia del RUDAK 9k6 downlink.
Una nueva version (1.4c) del P3T esta disponible en http://www.cstone.net/~w4sm2/software2/P3t_AP.zip
El programa AO40Rcv a sido actualizado a V1.3x y puede ser bajado de
www.qsl.net/ae4jy/ao40rcv.htm (no existe mas este link)
DL6DBN, 03.05.2001
Noticias AO-40 : Comenzo nuevamente el Magnetorque
El comando de actitud activo por el magnetorquing ha empezado
de nuevo. Primer objetivo es ALON/ALAT 0/0 para conseguir una orientación
de la antena perfecta para el funcionamiento del transponder general.
Durante el proceso de el magnetorquing pueden observarse las variaciones
de frecuencia pequeñas debido a la carga actual y los campos magnéticos
de las bobinas de torque. El RUDAK-A Downlink cerca a 2401.744 MHz en
órbita 232 casi la misma señal como la baliza central en 2401.323 MHz.
DL6DBN, 02.05.2001
Pruebas con el RUDAK
El 5/1/2001 los RUDAK experimentos en AO-40 fueron encendidos
y disponibles al equipo de RUDAK por probar. Durante el periodo de las
1400U hasta aproximadamente 1615U el procesador del RUDAK-A se comando
a través de una serie de pruebas por el Jim White, WD0E, en Colorado.
Los comandos eran bastante confiables en la banda L uplink. La ganancia
de modulador-1 se incremento y el downlink resultante en 2401.72 era utilizable
para la mayoría de este periodo como entornos de ángulos mejorados debajo
de 50 grados. Algunos software iniciales fueron cargando y ejecutado,
el reloj del tiempo-real fue seteado, un mensaje de texto corto se puso
en la cola del downlink y algunas pruebas para medir desviación y frecuencias
se completó. Más carga de software estaba en marcha a LOS. Toda la comprobación
durante este periodo tuvo el éxito, sin embargo mucho queda para ser probado
y prcticado.
El plan para 5/2/2001 incluye el cargando adicional de software, alguna
prueba inicial en RUDAK-B y posiblemente algúna telemetria inicial. Si
el tiempo y los ángulos permiten el servidor de CAN se cargará y nosotros
podremos mirar a las 16 temperaturas disponible a través de RUDAK. También
puede ser posible impulsar al experimento de CEDEX y obtener algunos datos
de radiación de inicial. Las Pruebas y los planes después de eso son inciertos
y dependerán principalmente en adelante los ángulos y visibilidad del
paso.
Por favor no intente el uplink a RUDAK, hasta que las pruebas se completen
y liberado para el funcionamiento general. Ese hito se anunciará en
el downlinks de RUDAK y por ANS. Mire www.amsat.org para el progreso del
estado del satelite.
Jim White
wd0e@amsat.org
see also: AO-40 RUDAK-Site
AMSAT, 02.05.2001
RUDAK Encendido, Carga del Software por venir ¡
Hace simplemente unas horas (2001-05-01, 04:19 UTC): RUDAK
Se encendio por primera vez luego del Incidente!
Nuestra estación de Comando Stacey W4SM reporta, que el balance de potencia
se mantiene positivo y todo parece normal. Jim White WD0E del Grupo RUDAK
arrancaran el CPU del RUDAK CPU con el software, para más comprobaciónes
futuras.
Y aquí esta un estudio de la hibernación #2 downloadable,
generado por la Estacion de Comando del AO-40, James Miller, G3RUH . Con
la recuperacion de datos en el sensor del sol, el mando de actitud por
el magnetorquing sera posible pronto. Esto encaminara a mejor poscicionamiento.
73s Peter, DB2OS,
para el Grupo de Comando del AO-40
Extrapolated attitude for Mai 1st, 2001 (Orbit 232): ALON/ALAT 70/12
AMSAT-DL, 01.05.2001
U y L Bandas Pasantes Fueron Chequeados OK
Ayer, en la órbita 226 las bandas de U, L y U+L en RX se
conectaron a las Bandas Pasantes de S2 al downlink
de Tx y se comprobó brevemente por las estaciones de comando G3RUH y W4SM,
usando PSK, CW, y SSB
señales para el uplink.
Las pruebas trabajaron muy bien y confirman que el interruptor de la Matriz
funciona correctamente en éstas
combinaciones.
Esto prepara el camino con la confianza en que el transponder funcionara
muy pronto, cuando la actitud se
acerque a alon/alat 0/0 vía el magnetorquing.
Mantenga la sintonia en anuncios futuros con respecto a la operacion general
del transponder
73s Peter, DB2OS
Latest Keplers:
AO-40 [NORAD]
1 26609U 00072B 01102.03791965 -.00000065 00000-0 00000+0 0 639
2 26609 5.2584 205.3483 8141831 249.7943 14.2478 1.26973008 2068
Satellite: AO-40 [NORAD]
Catalog number: 26609
Epoch time: 1102.03791965
Element set: 63
Inclination: 5.2584 deg
RA of node: 205.3483 deg
Eccentricity: 0.8141831
Arg of perigee: 249.7943 deg
Mean anomaly: 14.2478 deg
Mean motion: 1.26973008 rev/day
Decay rate: -6.5E-07 rev/day^2
Epoch rev: 206
Checksum: 366
________________________________________________________________________________________________
¿Puede convertirse esta temperatura en un ángulo de Sol?
Recuerde, en el momento el El ángulo del sol estaba en regiones desconocidas
> +45° para los que nosotros no tenemos datos directos de calibración.
Lo que nosotros tenemos ahora, sin embargo, es temperaturas de panel-solar
versus ángulo del sol para una inmensamente mejor caracterizaron de
la hibernación #2. La diferencia es que en hibernación #1 los ángulos
del Sol eran positivos (El Sol ilumina la parte superior del satélite),
y durante hibernación #2 los ángulos del Sol son negativos.
Así que asumimos globalmente que el perfil de temperatura de los paneles-solares,
es simétrico aproximadamente con cero ángulo del Sol.
Es decir, nosotros suponemos que los tableros están calentados igualitariamente
con ángulos del Sol positivos como así también con ángulos de Sol de
negativos. puede que no sea una asunción perfecta, pero no debe estar
demasiado lejano.
En hibernación #2, una temperatura de -11C a -13C corresponde a un ángulo
del Sol de -60°.
Así nosotros proponemos eso durante hibernación #1, el peor ángulo del
Sol fue de +60°. SA(max) = +60° supone que la cámara IHU-1, y la cámara
SCOPE no se expusieron a luz dañina del sol directa
Que es lo que ocurrio realmente?
Nosotros podemos construir en este resultado para deducir la historia
de actitud para la hibernación #1. Un ángulo del Sol de +60° alrededor
de órbita 120 implica un ALAT de +7°. Si nosotros también asumimos este
valor de alat a la entrada y salida de hibernación, entonces nosotros
encontramos las siguientes actitudes para el satélite:
| Orbita SA alon alat
------+-------------------------
Entry | 89 46 241 7
Nadir | 120 60 227 7
Exit | 149 46 214 7
------+-------------------------
Inbernacion #1 tabla de actitud
Hay más para ser ordeñado de estos datos.
De la tabla, la proporción de cambio de ALON se ve que es -0.435°/perigee.
Ahora la proporción de cambio en ALON debido a la precesión normal del
plano de la órbita es -0.161°/perigee.
Por consiguiente el "Misterioso Efecto" cuenta para una tendencia adicional
en ALON -0.274°/perigee.
Ahora comparemos Invernacion #1 y Invernacion #2:
Observado Natural Misterioso
cambio cambio Efecto Velocidad
ALON ALON ALON de giro
Orbitas °/p °/p °/p rpm
-----------------------------------------------
89-149 -0.44 -0.161 -0.274 17.60
202-218 -2.45 -0.161 -2.289 2.05
-----------------------------------------------
Instintivamente usted esperaría que la tasa de deriva en el ALON sea
inversamente proporcional a la proporción de giro. Increíblemente, la
comparación de las últimas dos columnas muestran que esto es verdad.
Todo basado en unas temperaturas del panel-solar.
¡No es una percepción retrospectiva maravillosa!
Homilía
Este análisis ilustra claramente que a pesar de estar en órbita durante
casi 6 meses, nosotros todavía estamos tomandole la mano al AO-40.
Mucho esta sin calibrar (uncalibrated), y las cosas a menudo no se pueden
explicar hasta después del evento, usando elementos de telemetria que
podrían haber parecido insignificante en su momento.
No hay NINGUNA respuesta simplemente al buscar en el manual; no hay
forma.
Nosotros estamos escribiendo el manual como y cuando ocurre.
Notas
Hibernación
"Hibernación" es un término aplicado a los periodo que cuando el ángulo
del Sol excede que 45° y los sensores del Sol no pueden funcionar y
pueden privarnos del mando de actitud vía el sistema del magnetorque.
Así el satelite tiene que soportar un frio hechizo con ángulos del Sol
desventajosos; esperemos que no demasiado desventajoso. Han habido hasta
el momento dos de estos periodos:
Hib. Date Orbits
---------------------------
1 2001 Jan/Feb 89-149
2 2001 Apr 202-228
---------------------------
Angulo Solar
Este es el ángulo entre la dirección del Sol y el ecuador del giro
del satelite.
Así un ángulo del Sol de 0° ilumina los paneles solares al máximo, con
un ángulo del Sol de 90°, está directamente hacia la cima o lateral
del satelite y no ilumina en absoluto.
La meta es mantener el ángulo del Sol entre + / - 45°. Esto no siempre
es posible.
El "Sensor del Sol" mide este ángulo, con tal de que este sobre el rango
anterior.
El Satelite que gira
El principio de conservación del momento angular requiere que la dirección
del eje del giro permanesca constante en coordenadas inerciales a menos
que actue un elemento /externo/torque.
Con el satelite P3 la única consecuencia de torque viene supuestamente
del magnetorquers, cuando ellos están en uso.
Cualquier otro cambio en dirección de actitud debe ser por consiguiente
debido a alguna otra fuente de torque.
La dirección de actitud también puede ser cambiada por una re-distribución
interior de velocidad de momento angular , en particular, las ruedas
de velocidad adquirida.
Con esta imagen de Amsat-dl podemos visualizar la actitud del satelite
en el momento que se puede recibir la baliza
en 2,4 g.
Post-launch info 0900 BST 15 Abril
ALON está cambiando por aproximadamente -3 deg por órbita.
La mejor recepción hoy, parece estar en el rango de MA 235 a 250. DB2OS
informa: No hay ninguna Baliza entre
MA 3 y MA 80 para conservar energía.
La Actitud continúa flotando rápidamente:
Orbita Alon Sa Temp.
202 143 -49 10.0
203 139 -51 10.0
204 136 -53 10.0
205 134 -56 10.0
206 132 -58 9.4
207 129 -60 8.7
(Sa = Angulo del Sol sobre el Satélite)
ALON esta basado en el momento cuando el Sensor de la Tierra
deja de censarla (ambos limites superior e inferior )
El Angulo Solar esta basado en ALAT ~0º. Extrapolando los datos anteriores,
los Sensores del Sol en el SEU deben
recuperarse el 2001 Abr 29, órbita 228, cuando el Angulo Solar SA tenga
-45º y el ALON tenga 74º .
Nosotros tenemos todos los datos ahora de la cámara YACE, la telemetría
normal esta activada nuevamente.
James Miller G3RUH proveyó los siguientes datos: Las fotos
de la Órbita 207 MA 250, Se sacaron cuatro fotos.
La calidad de JPEG era Q20 para mantener el tamaño del archivo pequeño.
Los JPEGs son con escala de 256 grises.
Basado en los ultimos elementos keplerianos,
las condiciones heran:
2001 Apr 13 Rev 207
Image Filename utc MA
------------------------------------
P1 133206.JPG 1332:06 250.17
P2 133504.JPG 1335:06 250.84
P3 133803.JPG 1338:06 251.53
P4 134101.JPG 1341:06 252.20
------------------------------------
El IHU-2 reloj fue verificado y esta correcto dentro de
unos segundo.
La velocidad del giro es 2.047 rpm. En el momento, La vista de la cámara
del AO-40 de la Tierra era del Golfo de México.
Comentarios:
1. El satélite gira unos 14 deg durante la exposición; la distorsión es
mínima.
2. Las deformaciones redondas (como un cráter) se observa en la parte
superior e inferior. Sin embargo ellos no están en el mismo lugar como
las imágenes tomadas en la órbita 152.
3. El borde de la Tierra está en tres de estas imágenes, y la distancia
angular del borde de la visión da una actitud de alon/alat 128/14 indica
con convergencia de punto de alfiler.
4. Esta estimación está de acuerdo con los últimos gatillos de los sensores
de Tierra a las 1232:08 (bajo) y 1307:10 (superior), como era el caso
antes de este incidente.
5. Asumiendo la actitud 128/14 es correcto, el ángulo del Sol para estas
imágenes es -55º; es decir, el Sol esta a 35º del
eje -Z de giro; la vista desde la cámara es +Z.
Conclusiones
1. la cámara y mucho del IHU-2 está trabajando.
2. ES y monturas de la cámara están inalteradas.
3. Nosotros tenemos una idea firme ahora en la dirección de actitud.
Aqui tenemos un ejemplo de las pisadas de las fotos tomadas por la camara
Post-launch info 0930 BST 14 April
Nuevos keplerianos arriba. ¡El ángulo que apunta el AO-40
esta definitivamente mejorando!
Si usted tuvo problemas para escucharlo antes, pruebe nuebamente (escuche
antes del perigeo).
Las estaciones de commando están sacando algunas fotos con la cámara de
YACE durante las próximas órbitas.
Esto probablemente ya ha comenzado. En cuanto las fotos se hayan sacado,
AO-40 empezarán enviandolas en D-bloques.
Al contrario de las transmisiones de JPEG anteriores, los bloques de D
se enviarán por un periodo extendido de tiempo y se permitirán múltiples
repeticiones de la sucesión entera.
Ésto no permitira coleccionar tantos D-bloques como es posible - buenos
o malos.
Nosotros podemos reconstruir bloques con buen CRCC a partir de bloques
malos usando una tecnica de reconstrucion llamada,(majority-voting bit
merge technique).
La mayor cantidad de bloques-D capturados, la mejor oportunidad de completar
el dataset.
Menor compresion de JPEG se usará, habra que espera aproximadamente 100
D-bloques en el juego completo.
Por favor Zip y envíe su telemetry a ao40-archive@amsat.org,
CADA BLOQUE CUENTA, MALO O BUENO.
AMSAT-DL, 09.03.2001
Post-launch info 1035 BST 13 April
DB2OS: La S2 Baliza se apaga en parte de la órbita.
El IHU está ejecutando una tarea del software para controlar
las situaciones críticas; una de estas tareas es mantener el
ojo en el voltaje de la batería.
Actualmente el IHU apagará la Baliza de S2 si el voltaje de batería cae
debajo de 26 Voltios.
Esto es debido al pobre angulo del sol y tambien eclipse solar. Mientras
los 26V no sean críticos, nosotros preferimos
estar tan seguros como sea posible durante el actual periodo de ángulo
de sol malo.
Ayer el IHU apagó la Baliza entre MA=8 y MA=128. también pasó en la órbita
anterior y se espera que continúe durante
algún tiempo.
Como fue calculado, nosotros perdimos el enganche LOCK con el sol al final
de Órbita #201 y estamos oficialmente de
nuevo en "hibernación." Los magnetorquers están apagados y no puede usarse
hasta que nosotros estemos de nuevo en la posicion de enganche LOCK o
sea que los sensores de sol que son dos lo puedan detectar nuevamente.
Aunque el SEU (Sensor la Unidad Electrónica) no es fase cerrada con llave
en el Sol,
No obstante el sensor de Tierra todavía puede ver la Tierra. Aunque sus
valores son sin sentido, cuando el borde de la
Tierra se alcanza, al tomar valores finales extremos de maximas y minimas
cuentas de ES, y permite que el ALON sea
estimado, así como un ángulo del Sol, asumiendo el ALAT ~0.
La velocidad de giro, provista por Helmut DL1IN de la fluctuacion de la
intencidad de señal de la Baliza es 2.2 rpm.
Debido a la actitud, puede esperarse calidad señalada mejore
durante las próximas semanas.
 Happy
Easter to everyone who celebrates it - G3RWL
Happy
Easter to everyone who celebrates it - G3RWL
Post-launch info 1945 BST 11 April
Paul, VP9MU, reporta que la actitud es ahora alrrededor de ALON/ALAT 139/0
(al termino de la orbita orbit #203).
Post-launch info 1815 BST 08 April
En la feria de Primavera del RSGB, llevada a cabo este fin
de semana en Milton Keynes, A James Miller, G3RUH, se le otorgó el Louis
Varney Trofeo por el RSGB. Esto se da para "los Adelantos en comunicación
espacial" y era un bien merecido reconocimiento para los esfuerzos que
James pone en los satélites de aficionados. Robin, VE3FRH, como una parte
de la presentación, reconocieron y agradecieron a James todo su trabajo,
particularmente la tarea actual de controlar AO 40.
También en la feria, El Presidente de AMSAT-NA, Robin Haighton,
VE3FRH, dio una presentación especial que tituló "AO40 y la consecuencia".
Robin trajo a todos al corriente con las últimas noticias y pudo contestar
un gran número de preguntas de las bases. ¡Era bueno ver el nivel alto
de interés mostrado en general por la población de radio aficionados -
hay todavía un gran potencial de público que espera usar el pájaro!
Planificación para el AO-40 Abril-Jun 2001
Los planes han tenido que ser cambiados en los últimos días.
Nosotros hemos encontrado que hay un efecto significante en el perigeo
causado (nosotros creemos) por la atmósfera.
Causa que el alon, disminuya unos 3°/perigee cuando la velocidad del giro
es de 2 r.p.m.
El alon ya reduce 0.7°/perigee debido al precession de el plano de la
órbita, por lo tanto estamos viendo un cambio de casi 4°/perigee o 5°/day.
A pesar de los eclipses, el magnetorquer es un poco mas fuerte que este
efecto, y nosotros encontramos que podriamos neutralizar esto y aumentar
el alon a aproximadamente 1°/perigee.
Pero cambiar alon de 170 a 270 a esa tasa de cambio iba a tomar un tiempo
muy largo, incluso dado que asumiéramos que pudiéramos extrapolar a una
geometría diferente.
Entretanto, la altura del perigeo está disminuyendo firmemente debido
a perturbaciones luni-solares, y nosotros perderíamos la ventaja probablemente
durante la maniobra.
Para que pasemos de alon 170 a alon 270 aumentar el alon se ha puesto
en espera.
En cambio nosotros vamos a cambiar alon en la otra dirección, bajándolo
a 90 y entonces a través de 0 y con la esperanza de llegar a fines de
año a 270.
Hay varios beneficios de este plan.
* Primeramente nosotros podemos utilizar el efecto atmosférico a aumentar
el magnetorquer y lograr un cambio más rápido en alon.
* Segundo, las comunicaciones mejorarán rápidamente debido a la mejora
de el alon.
* Tercero, cuando nosotros nos acercamos a alon = 0 estaremos en una posición
de probar algún funcionamiento del transponder más temprano, en lugar
que mas tarde lo que se apreciará ciertamente; -)
Durante este procedimiento, el satélite entrará de nuevo en "hibernación."
Éste es el nombre que nosotros hemos dado al estado donde el sistema de
sensor de Sol no puede ver al Sol, para que el satélite no puede ser magnetorqued
por los medios normales. Sin embargo, si el efecto atmosférico continúa
trabajando evidentemente como lo hizo durante la hibernación anterior,
este periodo de (> 45 deg) pobre ángulo del Sol será de vida corta. En
este momento, hay también una posibilidad que el Sol este casi coaxial
con el eje del giro.
Sin embargo el fondo de la nave espacial se iluminará, no la cima, y las
cámaras no se frieran.
Itinerario esperado, Lo siguiente es nuestra mejor estimación de como
evolucionarán las cosas. El ángulo del Sol alcanzará un punto donde el
Sensor dejará de ver el Sol alrededor del 5 de abril (-0, +3 días). Entonces
nosotros esperamos quizás 4-6 semanas para que el ángulo del Sol alcanze
su peor condición, y entonces recuperarse de nuevo.
Para este tiempo los alon deben favorecer alguna comunicación de la baliza
en forma decente. Aunque el sensor del Sol no dará datos, el perfil de
temperatura da pistas del ángulo de Sol, como puede verse del estudio
de el registro del telemetría histórico.
FECHA el SOL de ALON/ALAT AZ/EL SA ILLUM
--------------------------------------------
2001 Abr. 05 146/0 280/5 -44 72% (pérdida de lectura de sol)
2001 Abr. 18 110/0 289/11 -79 19%
2001 Abr. 25 90/0 294/14 -63 45%
2001 May 03 70/0 299/17 -39 77%
La tabla anterior es una estimación.
Todo es una estimación. AO-40 pueden ser casi medio un año viejo, pero
no obstante nosotros todavía estamos aprendiendo, y el está intentando
enseñarnos.
Nota al pie de página
El equipo de Comando da la bienvenida a la discusión informada, acerca
de por qué el alon está disminuyendo rápidamente es decir que la dirección
del vector de actitud cambia en el sentido de las agujas del reloj como
vio de anterior [+Z] el plano de la órbita. Este cambio sólo ocurre cerca
del perigeo. El fenómeno se observa claramente, pero no se explica.
73s Peter DB2OS
Presidente AMSAT-DL
 AO-40:
El IHU * NO * se paro
AO-40:
El IHU * NO * se paro
Estimados Amigos.
AO-40 dejo de enviar telemetría el 03 de marzo 9:42 y 9:54
que era antes del AOS de nuestra estación de control ZL1AOX.
El último datos que nosotros conseguimos era de David Tan 9M2DT y la recepción
del ultimo bloque de información bueno fue en MA 255, a las 2001-03-30
09:42:46.
Debido a la actividad solar actualmente alta (vea http://www.spaceweather.com
/) todos nosotros pensamos que el IHU-1
tubo un crash o sea una clavada del procesador con motivo de un SEU (Un
Evento Solo de Perturbación) qué no pudo ser corregido por el EDAC (Descubrimiento
del error y Corrección) en la unidad de 64KByte de Memoria de Sistema.
De hecho, nosotros notamos que un error de soft (que fue corregido por
el sistema EDAC) ocurrido entre las 09:06:14 y 09:07:36 del (MA 247).
El primer error de programa después de un tiempo muy largo. Sin embargo,
James Miller G3RUH encontró la razón por qué el software de vuelo del
AO-40 vuelo se detuvo.
La computadora no se paro; Estaba atascada en una subrutina del Z>R,T
de la rutina de navegación. Esta rutina toma MA (Z) como un argumento,
y retorna el Radio y la Anomalía Verdadera del Satélite en su órbita.
El problema es el límite de la convergencia para la vuelta (loop) de Newton-Raphson.
Esto fue prefijado en 6 unidades, y es correcto (OK) para el tipo de órbita
originalmente esperada).
Sin embargo la actual forma de la órbita realmente no es así, y finalmente
después del cargar los nuevos elemento kelperianos para poner al día el
software de IHU, los valores de SMA y excentricidad encontraron el dulce
lugar para que fallara la rutina.
Así la computadora del vuelo entraba en un lazo infinito.
La interrupcion de 20ms de el sistema continuó sin embargo trabajando,
para que UHR y MA, magnetorque y otro elementos continuaran haciendo tictac.
Después de la discusión de esto con el líder AO-40 del Proyecto Dr. Karl
Meinzer DJ4ZC, fue propuesto minimizar el trabajo
de recarga de todo el software probando un nuevo procedimiento, con un
"Reinicio en Caliente", qué James y Karl han puesto
a punto anoche por teléfono.
Ha sido probado por G3RUH numerosas veces en su simulador, y siempre ha
funcionado. El "Reinicio en Caliente" el procedimiento sólo requiere que
82 bytes sean cargados (uploaded) luego de un envío de RESET normal.
A las 05:02 UTC, justo después del perigeo en la órbita #191, Stacey Mills
W4SM tenía acceso al satélite y envió los bloques
de RESET/RESTART. Él fue rápidamente premiado con telemetría!!!
Él también cargo (uploaded) los remiendos (patch) a los Z>R,T, para
que la telemetría no se congelara nuevamente en el
próximo perigeo a MA 1.
Felicitaciones a James, Karl y Stacey y el equipo entero ¡por un trabajo
extraordinario - bien hecho!!
73s Peter DB2OS
Presidente AMSAT-DL
AMSAT-DL, 31.03.2001
AO-40:
el Giro a 5 RPM en marcha..
Queridos Amigos, Hay noticias buenas y las noticias confusas..
La ultima sesión de trabajo con el Magtetometro fue el 20
de marzo, y se reiniciaran pronto.
La velocidad del giro es actualmente de aproximadamente 1.8 rpm, el valor
final planeado, La proporción de reducción era aproximadamente -0.7 rpm/perigeo
cuando nosotros empezamos (a 17.6 rpm), y tanto como -1 rpm/perigeo en
órbitas posteriores.
La proporción de reducción del giro era más eficaz que lo esperado, llevando
desde 17.6 rpm hasta 1.6 rpm en 21 perigeos.
La actitud todavía está siendo medida, pero dio algunos resultados confusos.
Sin realizar magnetqorque nosotros observamos un cambio de actitud de
aproximadamente 5° por día (o 4° por el perigeo), aunque el máximo posible,
debido a movimiento del Sol y precesión, es de sólo 0.85 deg/día!.
Esta proporción claramente muy grande de cambio explicaría por qué los
magnetorques mostraron caídas más grandes en
ángulo solar (SA) que lo esperado, desde que las sesiones se espaciaron
por varios días, y también por qué la hibernación
era mucho más corta que la predicción convencional.
Luego de los análisis de la telemetría almacenada en toda la órbita (WOD)
fue encontrado que el cambio en la actitud sólo
ocurre cuando el satélite está en el perigeo.
Los efectos de arrastre en el perigeo que se tuvieron en cuenta son obviamente
más altos que los anticipados y calculados,
quizás debido a la actividad del sol.
Si esto continuara sin un cambio de actitud activo, nosotros correríamos
fuera del enganche del sol dentro de 10 días mas o menos..
Por ello es que fue decidido aumentar las revoluciones del satélite para
reducir el cambio rápido en actitud debido arrastre
del perigeo.
Esto nos dará mas aire para respirar .
Un paquete de 5 magtorques en el perigeo fue comenzado, empezando inmediatamente
para levantar la velocidad de giro
a 5 rpm.
La preparación para probar el motor (thruster) del Arcjet en cuanto la
actitud del satélite sea determinada y sus correcciones
estan en marcha.
73s Peter DB2OS
AMSAT-DL, 28.03.2001
AO-40 Fadingsituation & Fluglage - 8. AMSAT-DL Symposium
AO-40 Conferencia y Simpocio de AMSAT Alemania
Noticias
principales en encabezados:
Magnetorqueo (Vocabulario nuevo) en progreso para alcanzar
la actitud deseada para una prueba en frio o sea soltar gas sin
encenderlo del motor ATOS para una prueba. La posicion de ALON/ALAT hera
212/45 al 16 de Marzo y 5.8 revoluciones
por minuto.
La grafica inserta mas abajo demuestra como la tobera del
motor 400-N tiene efecto sobre la distribucion de señal de la
transmicion en la banda S2.
El Simpocio de AMSAT-DL ha sido stisfactorio con mas de
120 visitantes. La reunion anual general de AMSAT-DL eligio
una Comision Directiva nueva luego del fallecimiento del ex Vice-Presidente
8th AMSAT-DL Symposium has been very successful with more than 120 visitors.
The annual general meeting of AMSAT-DL elected a new Board of Directors
after the sad death of former Vicepresident Werner Haas, DJ5QK, y el Dr.
Karl Meinzer's
deseaba retirarse como Presidente y dedicarse de lleno como lider del
proyecto del AO-40.
Los presentes votaron a los siguentes, ver foto mas abajo:
Presidente: Peter Gülzow, DB2OS
Vicepresidente: Frank Sperber, DL6DBN
Tesorero: Hans Dörr, DF4FE
La nueva comicion directiva agradece a Karl Meinzer por su trabajo durante
primeros 28 años de AMSAT-DL.
La Comicion Directiva eligio a Karl Meinzer como Presidente Honorario.
El agradecimiento a Ulf Drewes, DL2YFA, por la perfecta organizacion del
el Simposio de este año.

DL6DBN, 20.03.2001
Las cañerias estan funcionando.
¡Estimados
Amigos!
Mas buenas noticias:
¡Las Cañerías de transferencia de calor parecen estar de nuevo en funcionamiento!!
El Tx S2 estaba funcionando con aproximadamente 35-37 °C durante el ultimo
par de semanas. Su temperatura ahora esta
entre 19-20 °C, esta es una indicación fehaciente que las cañerías de
intercambio de calor están funcionando correctamente después de que bajo
la velocidad de giro (spin).
También, el indicador analógico del giro regreso ahora cerca de su valor
correcto y muestra 9.6 RPM actualmente.
El magnetometro está realizando su trabajo muy bien y lo completará brevemente.
La actitud será aprox. 206/30 y 10 rpm.
Con ALAT ahora fuera del plano de la órbita, nosotros podemos empezar
a cambiar ALON así como también controlando ALAT y futura reducción del
giro.
Los próximos controles del magnetorque serán cargados en la órbita 167,
y se predice alcanzar actitud del s/c 248/45 y 5.8 rpm, después de 10
perigeos mas. La SA estará entonces alrededor de 38 deg.
Aquí esta la tabla y historia de el giro y ángulo del sol:
Expected Measured
Orbit rpm SA rpm SA
--------------------------------------------
156 17.59 39
157 16.93 38 16.73 38
158 16.18 37 15.87 37
159 15.43 36 15.20 35
160 14.70 35 14.66 34
161 13.95 34 13.91 33
162 13.22 33 12.99 32
163 12.50 33 12.11 30
164 11.80 31 11.36 28
165 11.11 30 10.74 27
166 10.41 29 9.82 25
73s
Peter, DB2OS, AMSAT-DL
AMSAT-DL, 12.03.2001
Mas noticias....
La velocidad de giro está disminuyendo muy bien.
James Miller, G3RUH proporciono la siguiente información:
Orbita R.p.m.
-------------
156 . 17.58
157 . 16.73
158 . 15.86
159 . 15.20
160 . 14.65
161 . 13.90
162 . 12.99 << 2001 Mar 08 [Martes] 0910 utc
-------------
Proporción de reducción -0.74 r.p.m./perigeo
En teoría AO-40 podría estar a 5 r.p.m. en 11 órbitas, u 8 días.
El eclipse comienza cada vez mas tarde (al presente MA 0.5) y ahora estamos
obteniendo mejores resultados gradualmente alrededor del perigeo. Rem.:
Magnetorquing necesita datos del sensor de sol y es mejor cercano al perigeo
los eclipses mas
tarde son mejores.
Ninguno de estos análisis sería posible sin el gran servicio de Paul Willmott
VP9MU en la recepción excelente de la telemetría, más los esfuerzos de
un gran grupo de integrantes anónimos fanáticos de la telemetría. ¡Gracias!
73s Peter,
DB2OS, AMSAT-DL
AO-40: Letzte Neuigkeiten - Keps #46
Un poco
más noticias..
El IHU-2 con la cámara YACE están trabajando OK ya se sacaron fotos
para una determinación de actitud rápida.
Sin embargo, las fotos con alta compresion en JPEG fueron no concluyentes.
Ver fotos desde el AO-40
Más fotos se sacarán una vez el los enlaces de comunicación sean más
favorables y la proporción del giro (spin) sea reducida. La utilizacion
del magnetometro (Magnetorqueing) esta realizando su trabajo reduciendo
el giro (spin) del satelite, de él valor inicial de 17.59 RPM a 16.73
RPM en el primer perigeo y 15.9 RPM en el segundo perigeo. Ésta es una
reducción en el orden de -0.8 a -0.9 RPM por cada paso por el perigeo
(perigee).
El valor deseado esta alrededor de 5 RPM.
Capturas de Orbita completa (WOD) estan en marcha para recoger más datos
de actitud. En cuanto el giro sea favorable, la actitud del satelite
se cambiará para mejorar los enlaces de comunicación.
Las fotos estan junto con la telemetria en el servidor
www.amsat.org.
73s (Saludos)
Peter, DB2OS, AMSAT-DL
AO-40
1 26609U 00072B 01063.46839262 .00000040 00000-0 00000+0 0 468
2 26609 5.4896 217.4466 8135323 230.0708 25.1699 1.26955273 1577
AMSAT-DL, 07.03.2001
Nueva informacion y Keps #44
La determinacion de la actitud del AO-40 esta en progreso.La camara
fotografica (YACE-Camera) y el computador
IHU-2 an sido prendidos para obtener informacion adicional sobre la
actitud cuando el AO-40 esta cerca de la tierra o sea
en el perigeo (perigee). Las primeras imagenes altamente comprimidas
mostrando partes de la superficie de la tierra han
sido bajadas y pueden ser encontradas en el archivo de la telemetria
del AO-40.
AO-40
1 26609U 00072B 01060.32118714 .00000009 00000-0 00000 0 0 445
2 26609 5.5180 218.3353 8134782 228.5693 26.7905 1.26955381 1535
Satellite: AO-40
Catalog number: 26609
Epoch time: 01060.32118714
Element set: 44
Inclination: 5.5180 deg
RA of node: 218.3353 deg
Eccentricity: 0.8134782
Arg of perigee: 228.5693 deg
Mean anomaly: 26.7905 deg
Mean motion: 1.26955381 rev/day
Decay rate: 9.0e-08 rev/day^2
Epoch rev: 153
Checksum: 280
DL6DBN, 03.03.2001
AO-40 Status-Update - AO40Rcv V1.0 - Keps #41
Queridos amigos,
¡Muchas buenas noticias sobre el AO-40!
El SEU (sensor la unidad electrónica) está viendo el sol de nuevo
después del eclipse extremo en la órbita #147.
El canal de telemetría #100 (valor de giro de análogo) está mostrando
un valor ahora de #49.
Éste es el mismo valor que estaba mostrando en la órbita #89, cuando
nosotros perdimos la lecturas del Sensor de Sol.
Dentro de algunas órbitas nosotros debemos ver que el Sensor de Sol
SS2 también comienza a tener lecturas y esto nos permitiría obtener
información de actitud y comenzar a realizar el magnetorquing para
bajar el giro (spin) del satélite.
Hace una semana que los sensores de tres ejes (3-axis) de sol, se
han encendido y parecen trabajar correctamente. Fue
planeado usar la información de los 3-axis omni y los sensores del
sol direccionales para obtener la información de referencia necesaria
para un nuevo algoritmo de programa para reducir el giro (spin) del
satélite sin utilizar el SEU. El nuevo código del software que se
insertara en los 20ms servicio de la interrupción, está casi listo
para el cargarlo (upload), pero debido al retorno prematuro de los
datos de SEU, esta modificación de programa podría no ser necesaria.
El análisis de la temperatura de IHU por DB2OS recientemente revelaron,
que el ángulo de sol de máximo, con las temperaturas más bajas, era
mas tempranas que lo anticipado. La temperatura del IHU que alcanzó
exactamente el mínimo, fue el 01de febrero del 2001, con una temperatura
de aproximada de -8.4 °C.
Esto es casi un mes más temprano de lo que originalmente se pensaba.
No hay ninguna explicación en el momento, por qué esta situación.
La velocidad de giro de alrededor de 17.5 RPM no ha cambiado en las
últimas semanas y lo que originó este aumento de revoluciones para
llegar al actual valor, a parado. En cuanto el SEU entregue datos
de sensor de sol buenos, los magnetometros (magnetorquers) se usarán
bajo el comando del IHU (unidad integrada de quehaceres internos)
para reducir el giro, esta reducción hará que los cambios de actitud
sean mas sencillos. Esto también mejorará la recepción de la telemetry
en la banda-S.
La próxima milla de piedra, es poner el satélite en una orientación
buena para luego disparar el Arcjet sin electricidad y solo el amoníaco
gaseoso. Las pruebas disparo se usarán para verificar el control electronico
del Arcjet y sus válvulas. Incluso sin el Arcjet "quemando", el empujón
del disparo de prueba será bastante para levantar el perigeo en aproximadamente
100km.
Varios análisis independientes (incluso la agencia espacial francesa
CNES) confirmaron, que la órbita actual será estable durante muchos
años, es decir más que la vida anticipada del satélite.
Las pruebas de disparando deben darnos el margen de seguridad adicional
y mas confidencia en que todo funciona correctamente. Sin embargo,
se planea perfeccionar la órbita actual con un Arcjet correctamente
funcional. Esto se planea después de probar que las ruedas de 3 ejes
(3-axis) de "momento" funcionen, se usarán para re-orientar el satélite
durante estas maniobras.
Mientras el satelite estaba en hibernación, las estaciones de control
estaban inquietas con preparaciones para las próximas actividades,
mirando la telemetry de la nave espacial y su salud.
AMSAT-DL expresa su gracias a Paul Willmott, VP9MU por su excelente
servicio recogiendo y archivando la telemetría del AO-40 de diferentes
partes del mundo. Ésta es información adicional vital para el esfuerzo
continuo para llevar al P3-D al modo operativo normal. Todos debemos
animarnos enviar telemetry capturado (con P3T) al AO40 archivo del
telemetry a
' ao40-archive@amsat.org '
Después de todo, el satelite parece estar en forma muy buena, sin
daño y perjuicios extensos u otros problemas descubiertos. El balance
de potencia es muy bueno e incluso durante el ángulo de sol de máximo
no era necesario reducir consumo de potencia apagando el transmisor
de la banda-S en sectores de la órbita.
Ésta es de hecho una señal buena para las próximas actividades.
Mantengan la sintonía...
Puede encontrarse información adicional del AO-40 en la página web:
http://www.amsat-dl.org/
73s Peter, DB2OS - AMSAT-DL
Joe Wheatley (AE4JY)
libro al uso la Version 1.0 de el programa AO40Rcv que ademas de enviar
datos demodulados via TCP/IP interno para que lo procese el programa
PT3, ahora muestra los valores de telemetria como texto. www.qsl.net/ae4jy/ao40rcv.htm (no existe mas este link)
AO-40
1 26609U 00072B 01054.81159824 .00000008 00000-0 00000-0 0 416
2 26609 5.5890 219.7632 8134843 226.0613 28.7159 1.26951328 1463
Satellite: AO-40
Catalog number: 26609
Epoch time: 01054.81159824
Element set: 41
Inclination: 5.5890 deg
RA of node: 219.7632 deg
Eccentricity: 0.8134843
Arg of perigee: 226.0613 deg
Mean anomaly: 28.7159 deg
Mean motion: 1.26951328 rev/day
Decay rate: 0.00000e+00 rev/day^2
Epoch rev: 146
Es geht bergauf mit AO-40! - Keps #38
( Lamento si a alguien ofendo pero este es el titulo en Aleman)
En estos
días el AO-40 tendrá el ángulo del sol más grande, con aproximadamente
78°. Desde ese momento el ángulo del sol disminuirá permanentemente
y alrededor del 21 de marzo el Sol debe regresar a los "ojos" del sensor
solar (sunsensor) (vea gráficos debajo). Entonces con información de
actitud a mano las maniobras para disminuir el giro y la reorientación
de la nave espacial puede empezarse. Pero si la rutina del software
anunciada puede llevarse a cabo de antemano y puede tener datos de actitud
fiables, el proceso puede ser realizado antes. Los trabajos en esta
rutina de programa llevaron bastante trabajo cuando la información debe
ser adquirida con otros sensores (paneles solares, cámaras o 3-ejes
omni-sunsensors) y pueda usarse. La propia rutina del software trabajan
sincronizados al latido del corazón (20 ms) del software operacional
por lo consiguiente debe probarse ahora muy cuidadosamente antes de
que pueda cargarse en IHU-1. La extrapolación de la última actitud conocida
de ALON/ALAT 248/-7 del 18 de enero a cambiado a hora a un ALON/ALAT
de aproximadamente 226/-7 el 20 de febrero. Tenga presente: aunque el
satélite es estable en el espacio, el sistema de referencia de la órbita
del AO-40 , está cambiando su precisión. Para que siempre dando un ALON/ALAT
con una fecha de referencia. Este cambio permanente de actitud, llevó
a los periodos diferentes de mejor recepción r (ahora MA 1 a 12) y el
primer informe de buen CRCC en los datos antes del perigeo (MA 251).

AO-40
1 26609U 00072B 01046.15851798 -.00000083 00000-0 00000+0 0 382
2 26609 5.6690 222.2686 8134836 221.7796 34.0600 1.26948856 1357
Keps #33 - Software Updates
No hay
ninguna noticia espectacular sobre el AO-40. El satélite esta todavía
en modo estable y la actitud (attitude) se esta desplazando, con lo
cual se tendrán mejoramientos futuros a principios de Abril. Las mejores
condiciones de recepción han variado de acuerdo a lo esperado (ver abajo).
Entonces buenos datos de telemetría pueden ser recibidos antes del perigeo
también en alrededor de dos semanas
Joe Wheatley, (AE4JY) a sacado una nueva version (0.4)
del AO40Rcv con la mayor modificaciion de servidor de TCP/IP para conectar
al programa decodificador de telemetria PT3 www.qsl.net/ae4jy/ao40rcv.htm (no existe mas este link)
Stacey Mills (W4SM) Nueva version del P3T (1.3f) como
tambien con modificaciones por los sensores que funcionan incorrectamente:
www.cstone.net/~w4sm2/software2/
More Information in German about this year's AMSAT-DL
Symposium is available at http://www.darc.de/distrikte/n/04/dl0ld/symposium.htm
AO-40
1 26609U 00072B 01033.57694040 -.00000044 00000-0 00000 0 0 331
2 26609 5.7772 225.7720 8134720 215.7457 44.3265 1.26935859 1197
Satellite: AO-40
Catalog number: 26609
Epoch time: 01033.57694040
Element set: 33
Inclination: 5.7772 deg
RA of node: 225.7720 deg
Eccentricity: 0.8134720
Arg of perigee: 215.7457 deg
Mean anomaly: 44.3265 deg
Mean motion: 1.26935859 rev/day
Decay rate: -4.4e-07 rev/day^2
Epoch rev: 119
Checksum: 287
DL6DBN, 14.02.2001
AMSAT-DL Symposium mit AO-40 Schwerpunkt
Simpocio de AMSAT-DL y Conferencia del AO-40
AO-40 todavía
están con sus limitaciones estacionales que acabarán naturalmente en
abril. Si la rutina de programa para reducir el giro (spining) tiene
éxito, AO-40 podrían estar en funciones antes de lo previsto. Los trabajos
y pruebas de esta rutina están siendo realizados.
Ahora S2-MB están operando nominal en 2401.323 MHz y pueden
oírse mejor entre MA 2 y MA 14. Esto cambiará lentamente debido a los
cambios de actitud (era ALON/ALAT 248/-7 en Enero 18). Los eclipses
que ocurren alrededor del perigeo no tienen una influencia negativa
en el balance de energía del AO-40's como lo demuestran los datos de
órbita completa. Nuevos Keplerianos ver debajo.
El simposio de AMSAT-DL de este año tendrá tres conferencias
sobre el AO-40, (AO-40 Telemetryreceiption, AO-40 Launchcampaign y historia,
AO-40 ahora y futuro) serán en Alemán por el editor de AMSAR-DL DL6DBN
y presidentes de AMSAT-DL DJ4ZC y DB2OS.
DL6DBN, 07.02.2001
Bei Nebel und Ebbe auf einer Sandbank - NORAD-Keps # 29
Como un barco encallado en un banco de arena y con niebla
NORAD-KEPS # 29
El AO-40
están actualmente como una nave en un banco de arena con marea baja
y con niebla.
En la niebla, porque debido al ángulo-solar alto (max.
77°) los sensores solares no pueden ver mucho temporalmente.
Con marea baja, porque al aumentar el ángulo-solar tenemos menos iluminación
(min. 23%) con menos producción de energía.
Y en un banco de arena porque el satélite no puede maniobrarse
para salir de esta situación miserable fácilmente.
El anuncio de la rutina (programa) para lograr controlar y reducir el
giro 17Rpm es una esperanza grande. Esta rutina debe trabajar sin los
datos del sensor del sol (sunsensor) y usará mediciones de los paneles
solares como indicadores de actitud (attitudeindicator). Trabajos intensivos
en este nuevo software están siendo realizados .
Aun cuando esta rutina no trabaje inmediatamente, no hay ninguna razón
de pánico. La niebla y marea-baja desaparecerán con los movimientos
del sol estacionales extensos alrededor de AO-40. En abril los sensores
verán el sol de nuevo y podrán iniciar nuevamente los controles activos
de actitud (attitudecontrol). Después de reducir el giro y con un mejor
ángulo solar (sunangle) y direccionamiento de las antenas (antennapointing)
todas las pruebas extensas (V-TX, U-TX, ATOS, ruedas(spin wheels)) puede
hacerse.
Las estaciones de comando G3RUH y W4SM hicieron a una
predicción a largo plazo de la nueva órbita del AO-40. Aun después del
accidente de último año y la disminución resultante del perigeo la órbita
del AO-40 será estable aunque el perigeo oscilará varios cientos kilómetros
(ver gráficos debajo).
AO-40
1 26609U 00072B 01025.71075817 -.00000073 00000-0 00000+0 0 290
2 26609 5.8657 228.4798 8130986 211.4041 49.8343 1.26937609 1098
DL6DBN, 30.01.2001
Coleccion de Orbita completa (WOD) -- Simpocio de AMSAT-DL
Ninguna noticia, es noticia
buena. Debido al tiempo de acceso limitado al AO-40 (MAs temprano) esto
causado que todos los procesos sen mas lentos. El giro todavía se se mantiene
a 17.7 rpm.
Datos de la Órbita enteros (WOD) se estan obteniendo de la telemetria
en los periodos en que no se puede escuchar en forma directa al AO-40.
Las últimas mediciones muestran los voltajes de las baterías estables
y la corriente de carga positiva, excepto durante el eclipse que ocurre
alrededor del perigeo.
El 8 Simposio de AMSAT-DL se realizará el 17 de marzo en Detmold
junto con la reunión general y anual de AMSAT-DL. El tema principal de
conferencias y presentaciones será el estado del AO-40 y cómo usar el
satélite.
Grafik: V. Kudielka, OE1VKW
DL6DBN, 27.01.2001
Updated TLM-Specs - Actualizacion de las especificaciones
de Telemetria
 Con los informes de recepcion actuales y dada actitud,
la condicion para la posibilidad de recepcion es alrededor del perigeo,
puede derivarse. Asumiendo un beamwidth de las antenas S2 es de 40 deg
pareciera que;
Con los informes de recepcion actuales y dada actitud,
la condicion para la posibilidad de recepcion es alrededor del perigeo,
puede derivarse. Asumiendo un beamwidth de las antenas S2 es de 40 deg
pareciera que;
- En el perigeo un lobulo lateral esta apuntando hacia la tierra proyectando
un circulo de 400 Kmts en diametro.
- Alrededor de MA 5 el lobulo principal ilumina la tierra, pero no completamente
(Earth 60°).
- Comenzando MA 9 el lobulo lateral esta apuntando nuevamente a la tierra,
dando su mejor iluminacion y recepcion hasta el momento.
- Por lo tanto hasta que no modifiquemos la actitud, el plano orbital
cambiara aproximadamente
- 0.5° hacia la izquierda (o el AO-40 hacia la derecha) cada dia generando
cambio de fases de buena recepcion.
Asumiendo varios aspectos, uno puede hacer a algunos cálculos rapidos
de señales qué puede esperarse al apogeo con antenas que apuntan a Tierra
(ALON/ALAT 0/0). Con los S2-TX el MB alcanzará 15 a 20 dB (S+N)/N. Como
un QSO tendrá un poco menos de poder (- 5 dB), los S2-TX darán 10 a 15
dB señal con un disco de 60 cm y un NF moderado de 1 - 2 dB. Como los
S1-TX, qué ya operaron correctamente antes de la maniobra de motor en
Dic 11, 2000, tiene aproximadamente 8 dB más de ganancia-antena, nosotros
podríamos esperar (S+N)/N de hasta 23 dB para un SSB-QSO como se calculó
antes del lanzamiento. Las antenas más grandes o más pequeñas darán mejor
o menor intensidad de señales. Con AO-10 y AO-13 el margen era sólo 17
dB.
El Team de Comando proporcionaron un actualizacion de las especificaciones
de telemetria, e. g. con respecto a sensores defectuosos o datos de
orbita completa.
DL6DBN, 19.01.2001
NORAD-Keps # 28
AO-40
1 26609U 00072B 01018.53756618 -.00000163 00000-0 00000 0 0 286
2 26609 5.9258 230.0726 8133560 208.4998 11.7742 1.26922670 995
Satellite: AO-40
Catalog number: 26609
Epoch time: 01018.53756618
Element set: 28
Inclination: 5.9258 deg
RA of node: 230.0726 deg
Eccentricity: 0.8133560
Arg of perigee: 208.4998 deg
Mean anomaly: 11.7742 deg
Mean motion: 1.26922670 rev/day
Decay rate: -1.63e-06 rev/day^2
Epoch rev: 99
Checksum: 299
Usuarios de la Banda-S y Telemetria
Varias estaciones, incluso G3RUH una de las estaciones de
Comando, han medido la frecuencia de la Baliza S2-MB en banda S, 2401.323
MHz. La actitud actual era determinada como ALON/ALAT 248/-7. Tenga presente
que a los programas le gusta, El WinOrbit tiene la necesidad de invertir
la fecha (ALON/ALAT 68/7). Los cambios de Actitud debido a los cambios
de Argumento de Perigeo y R.A.A.N. levemente cada día. Los valores dados
pueden referirse al 18 de enero. La baliza puede oírse antes del perigeo
entre MA 245 y 256. Debido al los cambios extremos del desplazamiento
por Dopler muy rápidos, junto con el wobbling por giro no se ha capturado
hasta ahora telemetría libre de errores.
 Moe
Wheatley, AE4JY, Publicó una actualización (0.3) de su programa AO40RCV
demodulador utilizando la placa de sonido (soundcard-demodulator).El comando
Dataexport es ahora compatible con el programa P3T, AFC (Corrección automática
de frecuencia) se ha mejorado, pueden usarse con archivos grabados de
sonido, También tiene la posibilidad de utilizar el control de frecuencia
del receptor con el método de CLIK del micrófono en forma automática lo
encontraras en: www.qsl.net/ae4jy (no existe mas este link)
Moe
Wheatley, AE4JY, Publicó una actualización (0.3) de su programa AO40RCV
demodulador utilizando la placa de sonido (soundcard-demodulator).El comando
Dataexport es ahora compatible con el programa P3T, AFC (Corrección automática
de frecuencia) se ha mejorado, pueden usarse con archivos grabados de
sonido, También tiene la posibilidad de utilizar el control de frecuencia
del receptor con el método de CLIK del micrófono en forma automática lo
encontraras en: www.qsl.net/ae4jy (no existe mas este link)
AO-40 Status-Update
Estimados Todos, Aquí
algunas actualizaciones del informe de Karl del 07 de enero.
* V/U/L1 receptor *
Los receptores de las V-banda, U-banda y L1 están trabajando bien con
las antenas de alta ganancia (HiGAIN), pero ninguno de ellos está recibiendo
señales con las antenas OMNI. O las antenas OMNI se dañaron o los cableados
o los relay de las antenas.
* V-TX *
El transmisor de VHF se probó varias oportunidades con las antenas de
alta ganancia (HiGain), porque nosotros sabemos que ellas están trabajando
bien (OK) con los receptores. Ninguna baliza fue escuchada, pero la telemetría
podrían indicar que el TX está trabajando. Se harán pruebas extensas y
incluyendo las pruebas de el V-TX de nuevo con las antenas de OMNI.
* U-TX *
Ninguna prueba se ha realizado todavía en la U-banda TX, pero se planea
también probar de nuevo el U-TX con las antenas de alta ganancia (HiGain)
y omni direccionales (Omni), cuando se reduzca el giro (spin) y las tuberías
de conducción de calor funcionen nuevamente.
* El Sistema de Mando de actitud *
El sistema de mando de actitud es funciona correctamente. Lamentablemente
debido al giro alto de aproximadamente 17 RPM, el sol cambia más rápidamente
de lo que nosotros pudiéramos cambiar la actitud. Porque el ángulo del
sol es ahora de aproximadamente 60 grados y fuera del rango a medir, el
sensor del sol electrónico dejó de trabajar temporalmente, por esto es
qué el indicador de Giro en la telemetría es ahora casi 0 RPM. Sin sol
y información de actitud, ningún comando al magnetometro (magnetorquing)
puede realizarse, así que ningún cambio futuro de actitud (attitude) o
el cambio del giro (spin) será hecho.
Sin embargo, Karl Meinzer DJ4ZC está desarrollando un nuevo algoritmo
de programa para reducir el giro (spin), sin usar la información de sensor
de Sol. Se probará en la próxima semana y entonces será usado para reducir
el giro y mover la actitud de la nave espacial.
Una vez que el ángulo del sol y el direccionamiento de las antenas este
mejorando, el estado de V-TX y el U-TX serán probados bajo mejores condiciones
de control y los experimentos convenientes. También se probarán lo más
pronto posible ATOS y las ruedas de estabilización.
73s Peter, DB2OS,
Vicepresidente AMSAT-DL
AO-40 - Banco de Frecuencias
Las frecuencias medidas
fueron publicadas (ver recuadro inferior). Fueron medidas durante las
pruebas de Radio frecuencia (RF) en Kourou a 23° Centígrados de temperatura
ambiente. Las mismas pueden variar por cambios de temperatura, envejecimiento
y efectos de las vibraciones durante el lanzamiento.
AMSAT-OSCAR 40 Frecuencias de Balizas
(Medidas antes del lanzamiento) |
| TX |
General Beacon |
Middle Beacon |
Engineering Beacon |
| V |
|
145.899 |
|
| U |
435.438 |
435.588 |
435.838 |
| S1 |
2400.188 |
2400.338 |
2400.588 |
| S2 |
2401.168 |
2401.318 |
2401.568 |
| X |
10450.975 |
10451.125 |
10451.375 |
| Ka |
24047.885 |
24048.035 |
24048.285 |
| Todas las frecuencias son
en MHz |
DL6DBN, 06.01.2001
AMSAT-DL, 09.03.2001



{kind=link}
{kind=link}
{kind=link}